

Nosso curso de Robótica Autônoma, o Manna TRUEM, teve uma primeira semana recheada de conteúdos e dinâmicas para que os participantes não só explorassem o universo da Robótica e seus conceitos detalhadamente, mas também desenvolvessem suas habilidades sociais e de trabalho em grupo, o que chamamos de soft skills, afinal, além de formar profissionais capacitados no que fazem, o Manna também investe na Educação 5.0 para contribuir com os cidadãos do futuro!
O curso de Robótica Autônoma fez parte da nossa Escola de Verão de 2023, e era destinado aos acadêmicos de qualquer área universitária que quisessem conhecer a teoria da robótica e aplicá-la na prática.
Nesta página, você encontra um diário de bordo completo de tudo o que aconteceu nessa primeira semana do curso, as atividades desenvolvidas e registros fotográficos!
Dia #1
A abertura do curso aconteceu com a presença de todos os professores que ministraram os conteúdos: os integrantes do Manna Rodrigo Calvo e Tiago Madrigar e os professores Guilherme Rocha e Breno de Oliveira.
A primeira atividade consistiu em uma dinâmica “quebra gelo”, cujo objetivo era que os participantes se conhecessem mais detalhadamente, assim, caso algum deles estivesse em lugar próximo a um amigo, deveria trocar de lugar para ficar próximo a quem ainda não conhecesse. Por 5 minutos, em duplas, os alunos realizaram uma entrevista pessoal para conhecer seu parceiro, abordando tópicos como hobbies, gostos pessoais, idade, estado civil, entre outros. Ao final da entrevista, cada participante apresentou o colega que entrevistou.
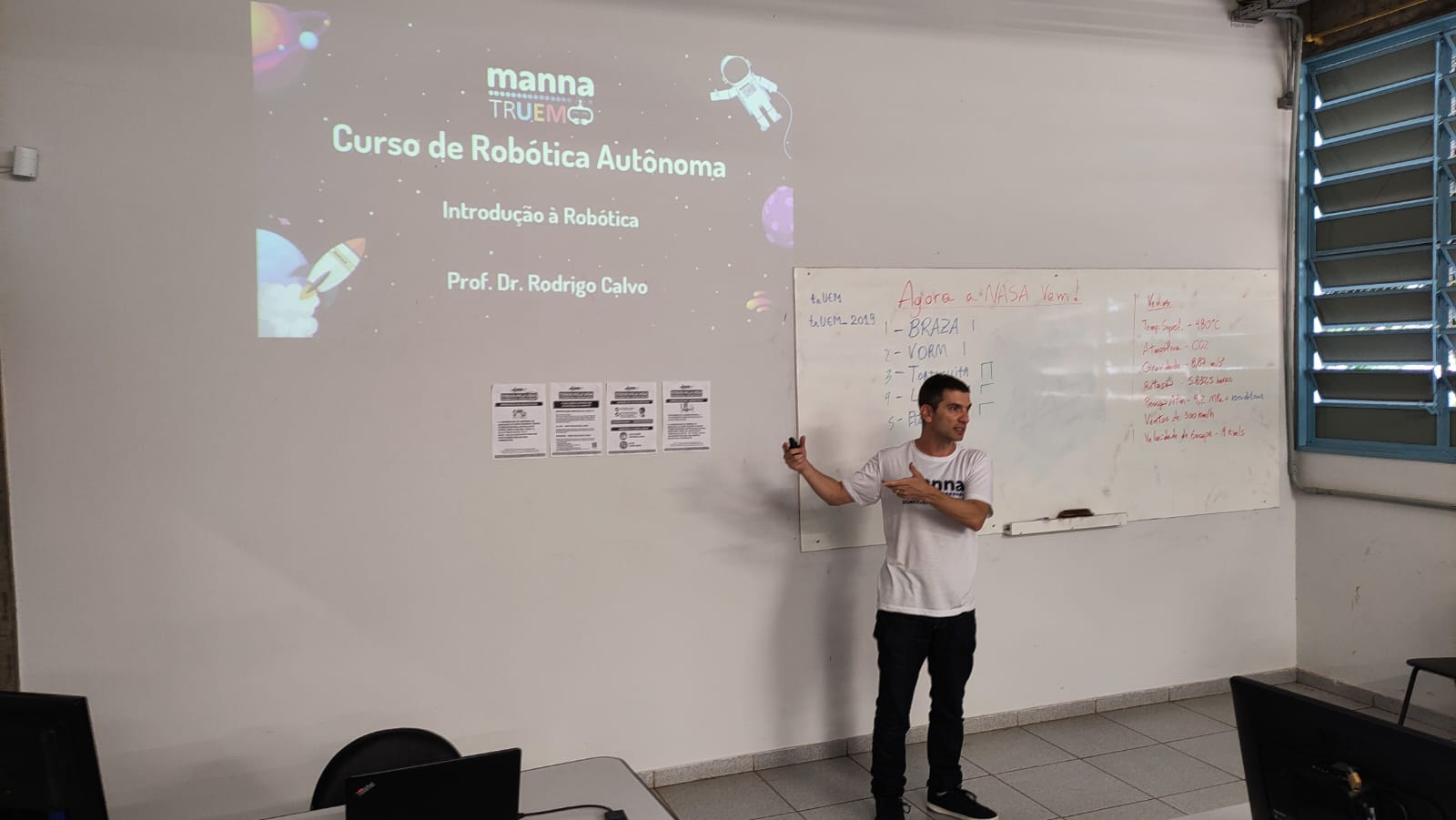
Após uma breve avaliação de aprendizagem, como previsto no trabalho com soft skills, sobre como foi a experiência na primeira dinâmica, os participantes foram desafiados a construir um robô, em grupos, para visitar o planeta Vênus. Para tanto, cada equipe precisava pesquisar e estudar o planeta, sua atmosfera e pressão, objetivando a construção do robô para uma missão especial. Ao final, cada grupo apresentou seus planos de ação, e os professores ao mesmo tempo questionavam detalhes, também criando empecilhos em cada plano de viagem para avaliar como os integrantes poderiam contorná-los mediante novidades não planejadas.

No período vespertino, os professores Rodrigo Calvo e Guilherme Rocha fizeram uma Introdução à Robótica, na qual abordaram assuntos como a história da robótica e o que é um robô, sua anatomia, movimentos, sensoriamento, controle e atuação. Também exploraram os tipos de controle e comportamento existentes, bem como a navegação, a localização e o mapeamento de um robô. Esta parte teórica foi finalizada com a aprendizagem em robótica e qual é o futuro dessa área de pesquisa.
Finalizando o primeiro dia, mais uma dinâmica foi aplicada, desta vez, os participantes deveriam levar uma caixa de um prédio a outro utilizando um robô. A cada equipe foi atribuído um cenário com diferentes configurações: escadas, elevadores, obstáculos diversos pelos quais o robô deveria passar para transportar uma caixa de 10 quilos de um prédio para outro. Assim, as equipes deveriam pensar na anatomia e autonomia do robô para a missão, por exemplo, se teria rodas, braços etc. Após a apresentação do planejamento de robô de cada equipe, os próprios participantes votaram nas melhores ideias.
 |
 |
 |
 |
Dia #2
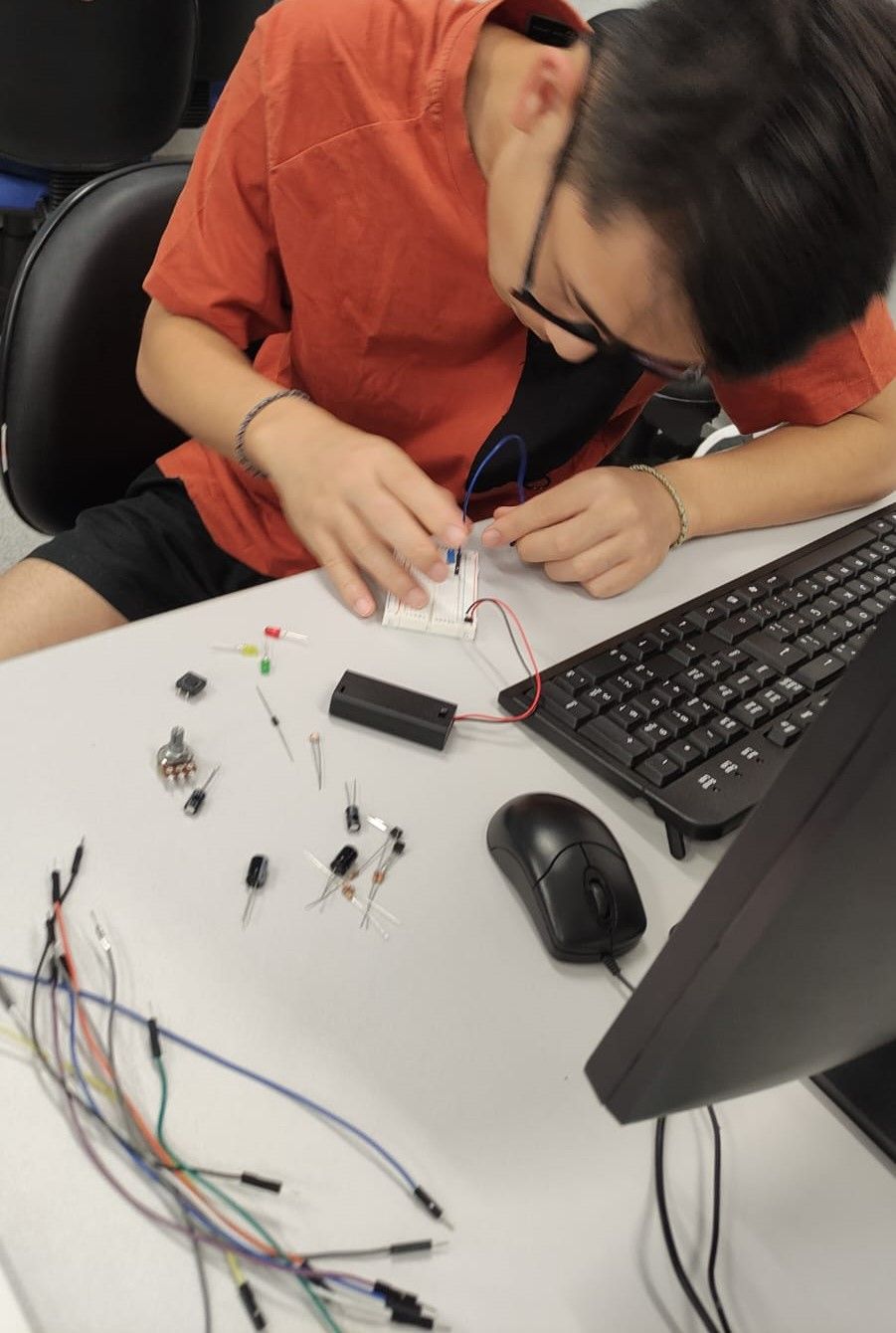
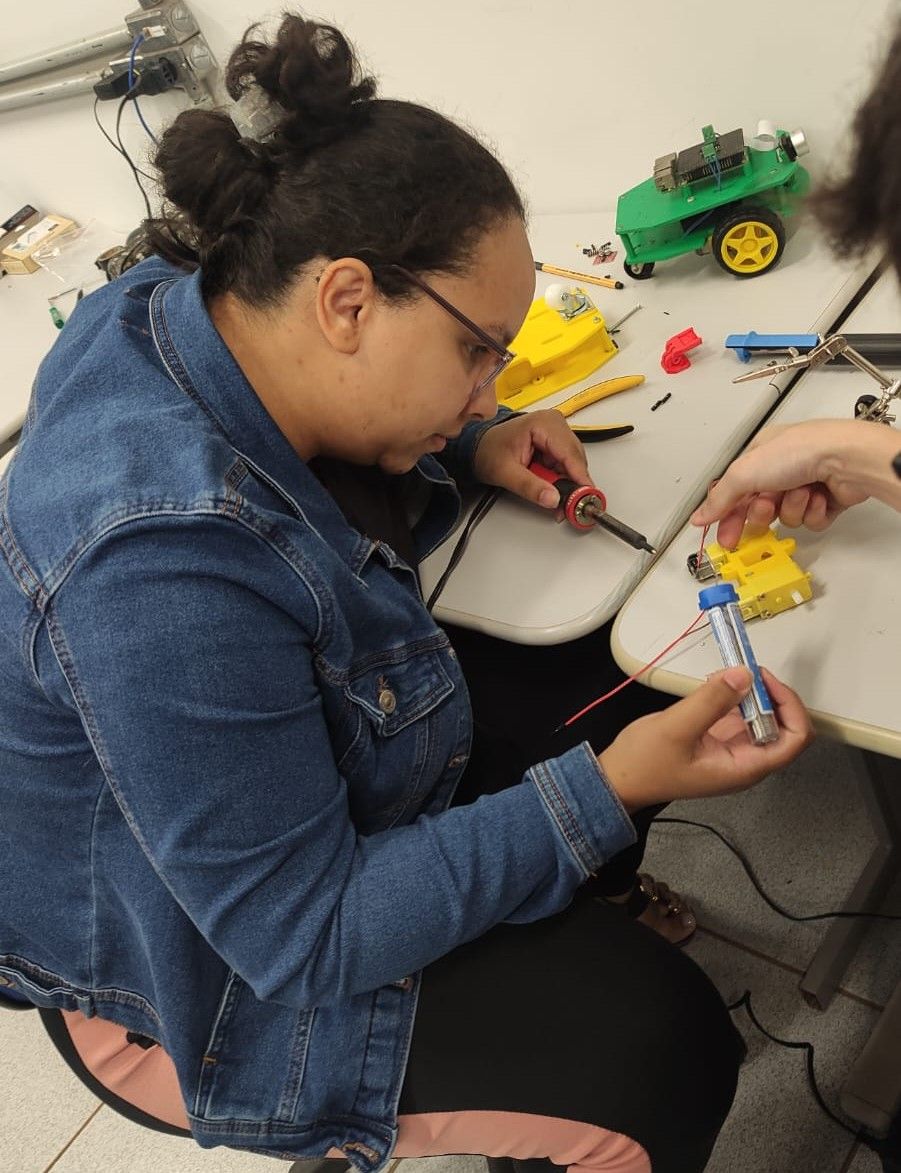
No segundo dia do curso, o professor Breno de Oliveira realizou uma Introdução à Eletrônica. Foram abordados tópicos como resistores, fontes de energia elétrica, corrente contínua e alternada, circuitos eletrônicos analógicos e digitais, amplificadores e ruídos.
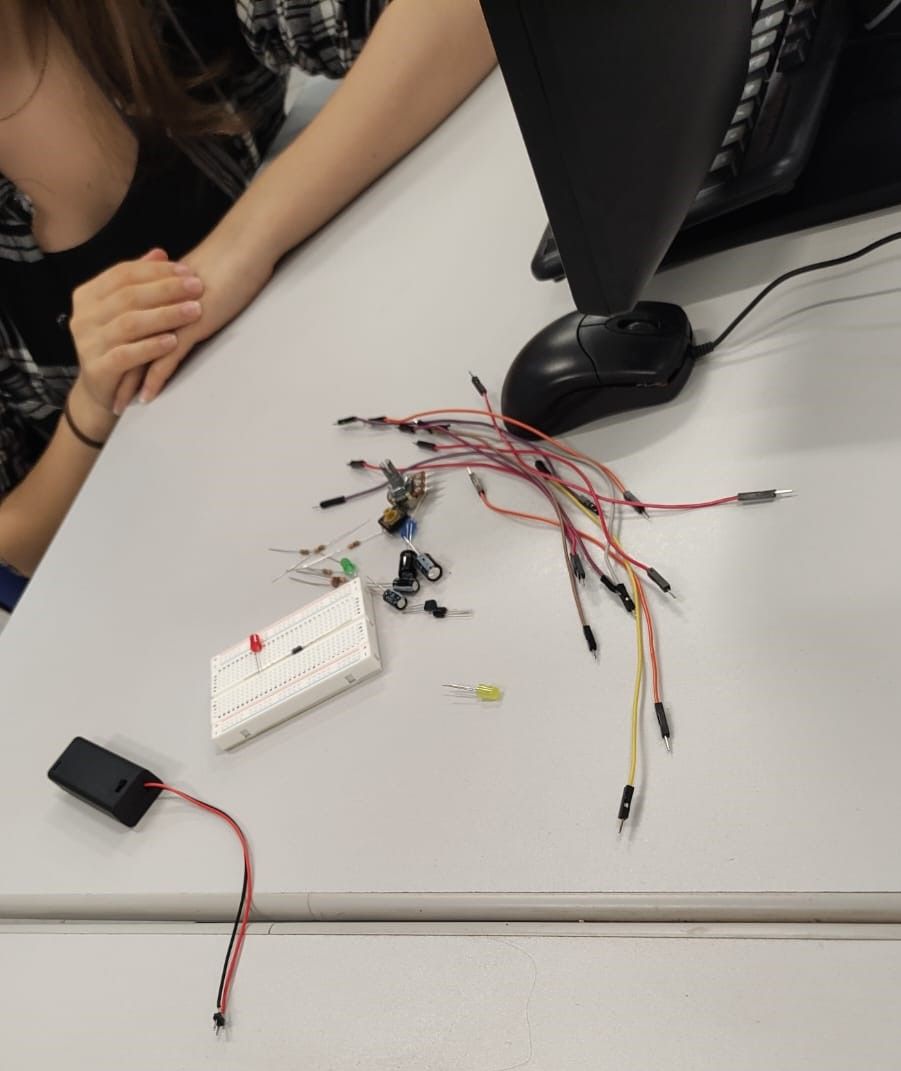
Após a exposição teórica, foi feita uma atividade prática com protoboard, resistores, diodos e LEDs.
 |
 |
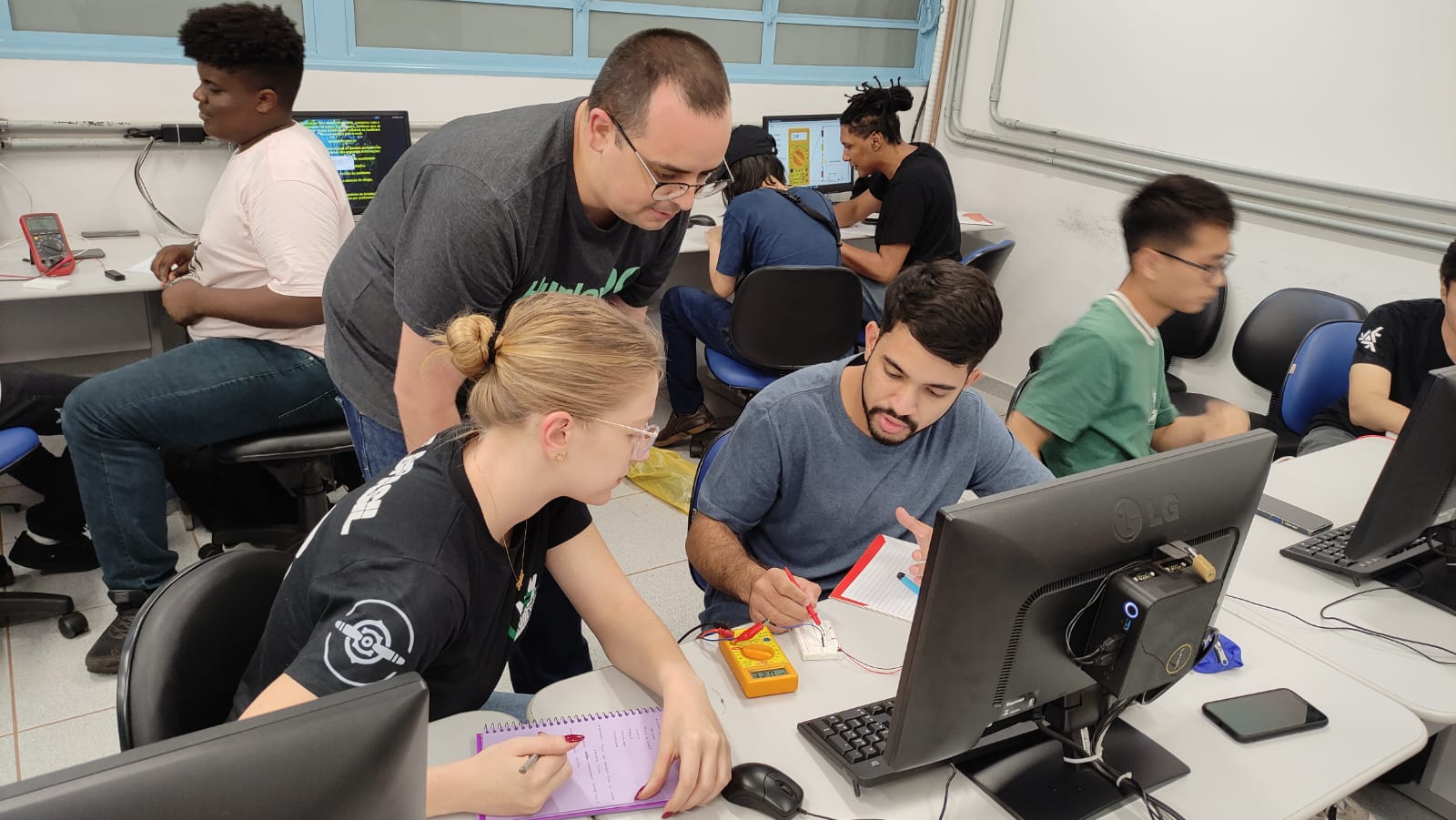
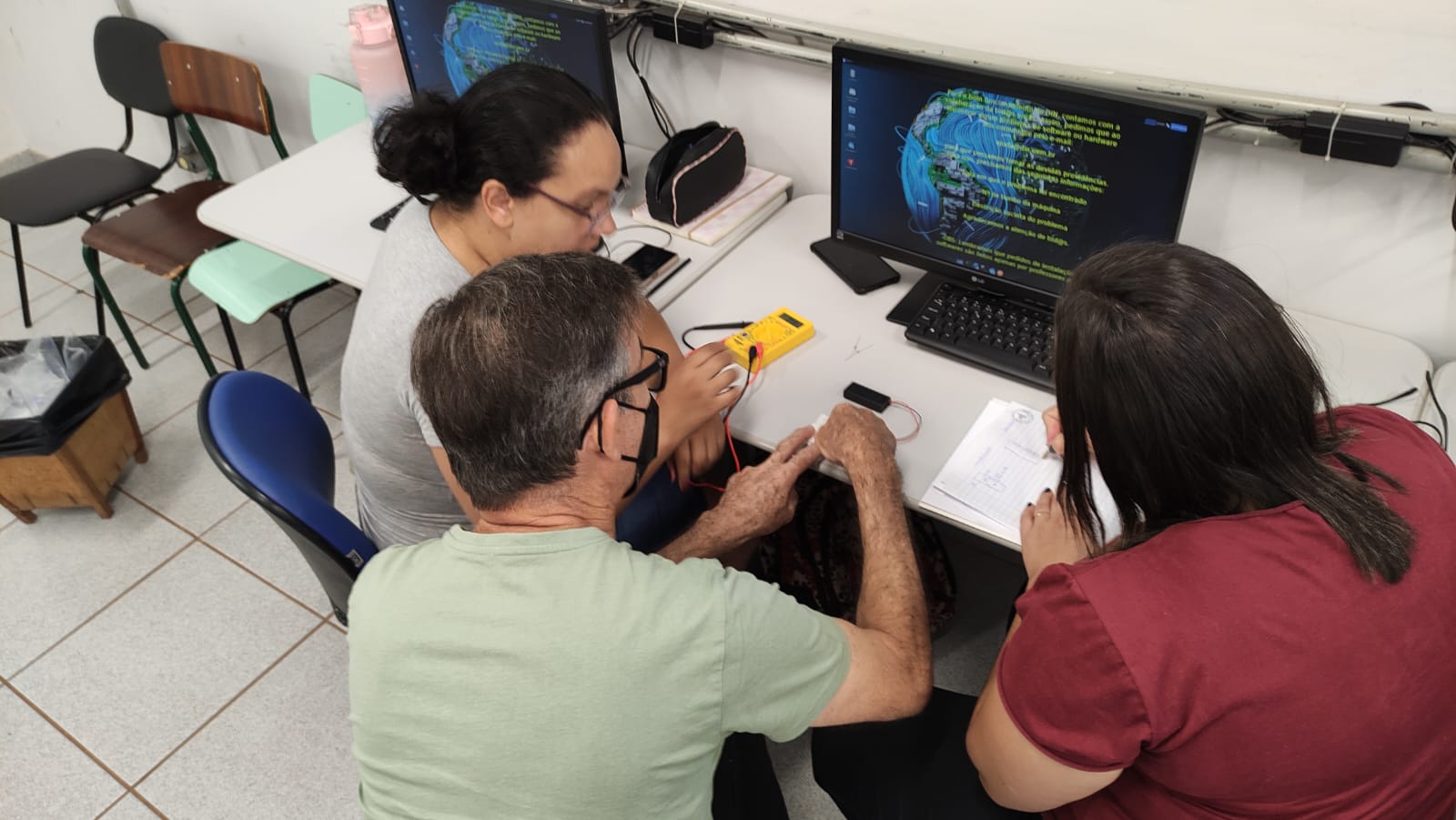
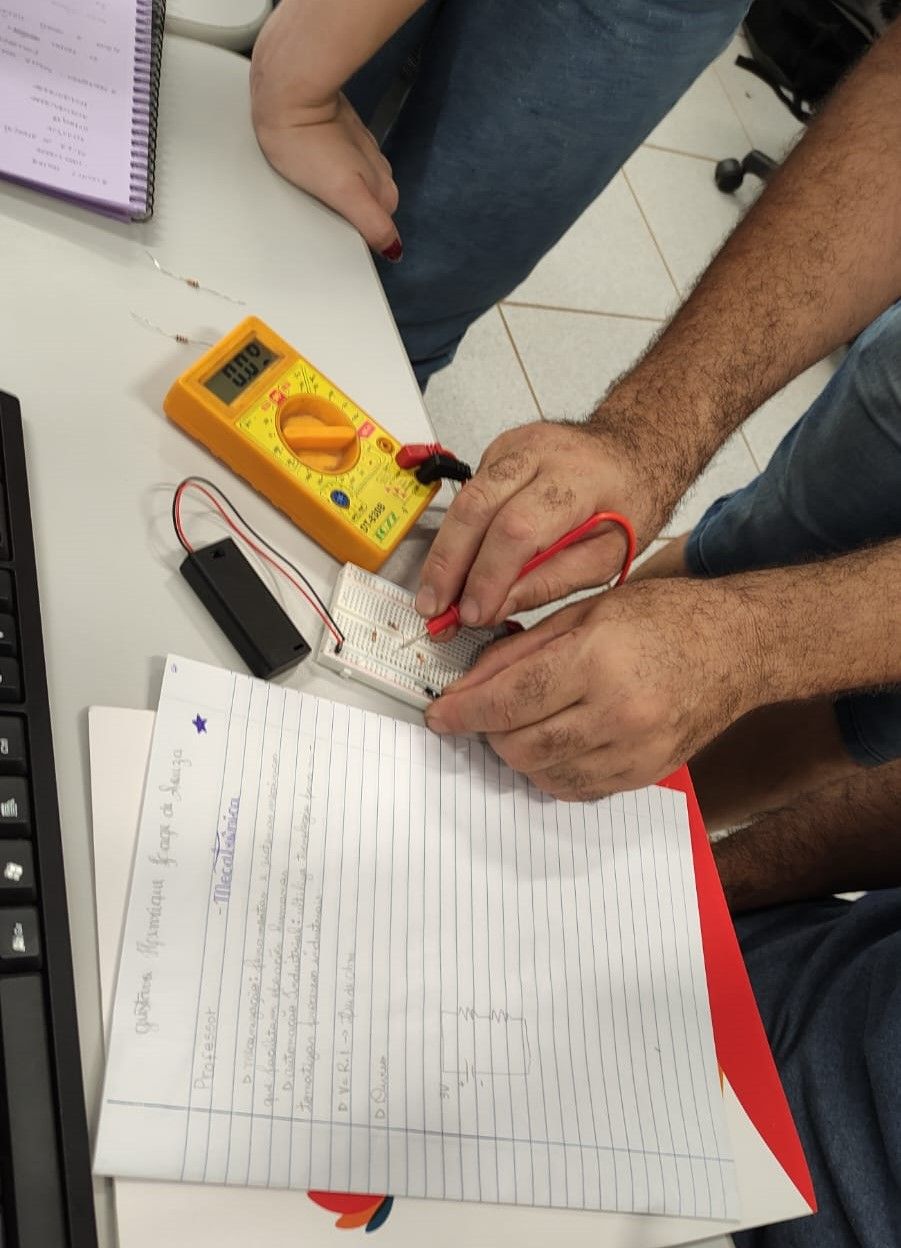
No período da tarde, ocorreu a Introdução à Mecatrônica com o professor Guilherme Rocha, que discutiu a concepção de sistemas mecatrônicos e automatizados, junto à cinemática e dinâmica dos robôs, sensores, atuadores e comunicação em automação. Também após a explicação teórica, foi realizada a atividade prática com o multímetro, um aparelho que mede tensão, e os participantes deveriam medir a tensão de cada componente em circuitos eletrônicos.
 |
 |
 |
 |
Dia #3
Microcontroladores C e C++ foram o tópico do terceiro dia do curso, com os professores Breno de Oliveira e Guilherme Rocha.
Os conceitos teóricos foram apresentados junto a atividades práticas. Alguns dos tópicos abordados foram sistemas microcontrolados (arquiteturas, linguagens de programação, memória, dispositivos de E/S, programação, temporizadores, interrupção, conversores analógico/digitais); registradores especiais; dispositivos periféricos (displays de cristal líquido -LCD, comunicação paralela, comunicação serial RS232, I2C e SPI); modulação por largura de pulso (PWM); módulos de captura e comparadores analógicos; e técnicas de teste e depuração.
 |
 |
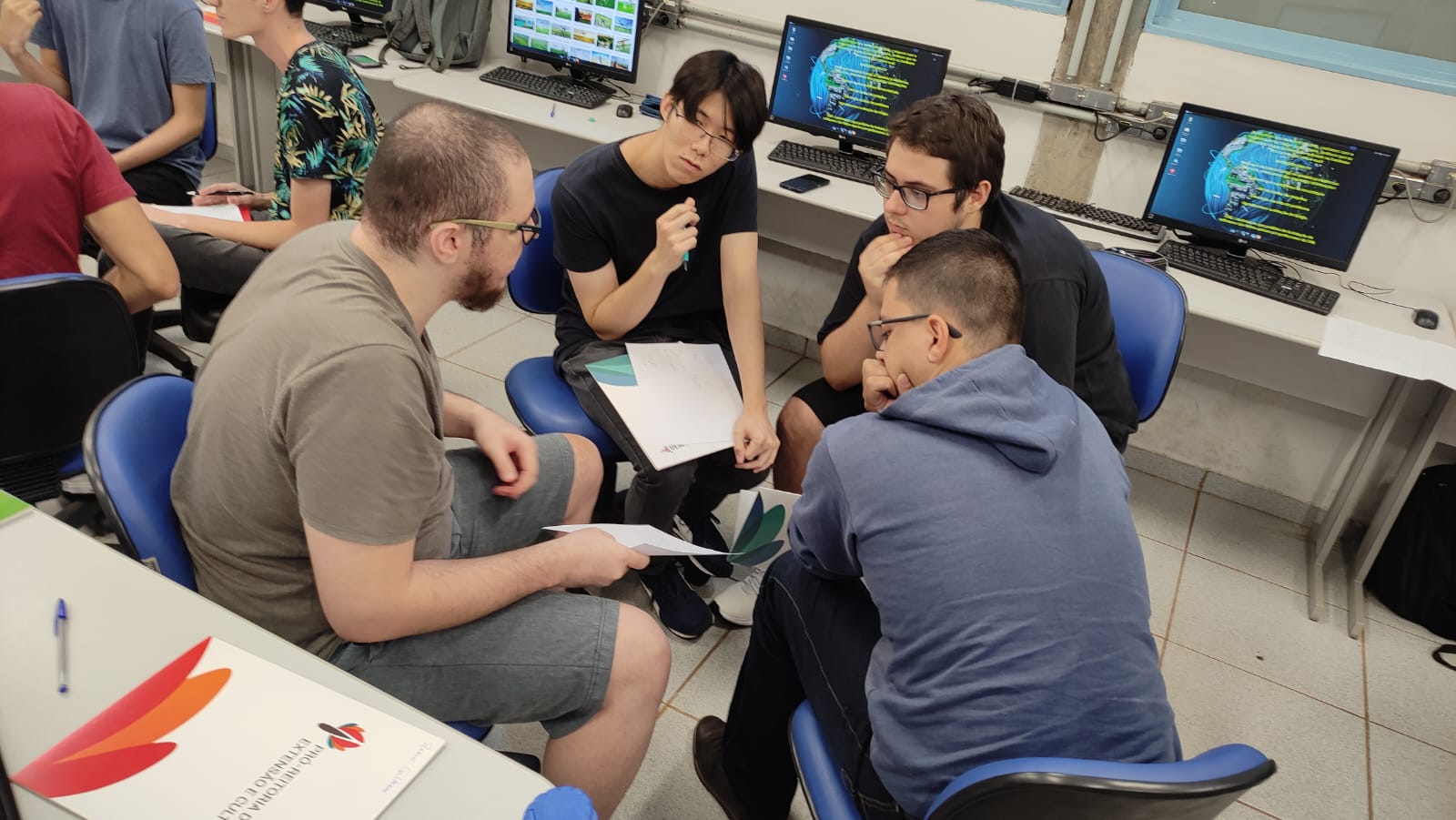
Também foram propostas atividades individuais e em equipe, nas quais os participantes resolveram problemas práticos e lógicos das linguagens de programação.
Dia #4
O quarto dia foi dedicado à programação em Python, com o professor Tiago Madrigar. Neste tópico do curso, os participantes tiveram uma introdução à Linguagem Python, abordando variáveis de entrada de dados, condições, repetições, estrutura de dados, funções, classes e objetos.
Após exposição dos conceitos importantes sobre linguagem de programação, foi realizada uma prática de execução de códigos na plataforma Google Colab, também levando em conta conceitos de orientação a objetos. Durante a aula, os alunos receberam quatro desafios nos quais precisavam cumprir uma tarefa definida sobre cada elemento e componente ensinado.
 |
 |
Já no período vespertino, o professor Guilherme Rocha trabalhou Visão Computacional, abordando os tópicos de bibliotecas de visão computacional, introdução ao OpenCV, processamento de imagens, transformações geométricas e operações aritméticas e morfológicas, tratamento de imagens, inteligência artificial aplicada à visão computacional e detecção de objetos para extração de características.
Começando com a visão computacional, utilizando a plataforma Google Colab, o professor criou exemplos de manipulação de imagens usando linguagem Python e, em seguida, foi realizada uma dinâmica que apresentou mais um desafio aos participantes: desenvolver um robô de solda submarina, que fizesse a soldagem e o mapeamento de objetos no fundo do mar.
 |
 |
Em equipes, de forma colaborativa, os alunos criaram um robô que utilizasse sensores para mapear e executar tarefas. Ao final, cada equipe apresentou os desenhos e esquemas de funcionamento de seu robô para cumprir o desafio, e a turma realizou uma votação para eleger aquele com melhor funcionamento.
Dia #5
O quinto dia do curso foi recheado de atividades com a parte teórica final para que os participantes se preparassem para a montagem dos robôs. O professor Rodrigo Calvo iniciou com a introdução à Robótica Móvel Autônoma, abordou também a arquitetura de controle de robôs móveis, sua cinemática e dinâmica junto ao planejamento de rotas, localização, mapeamento, SLAM, navegação e interação entre múltiplos robôs.
No período da tarde, o professor Breno de Oliveira trabalhou sistemas operacionais com os alunos: computadores SBC, Linux e respectivas distribuições, linhas de comando, operações Headless, controles de periféricos e aplicações em Python.
 |
 |
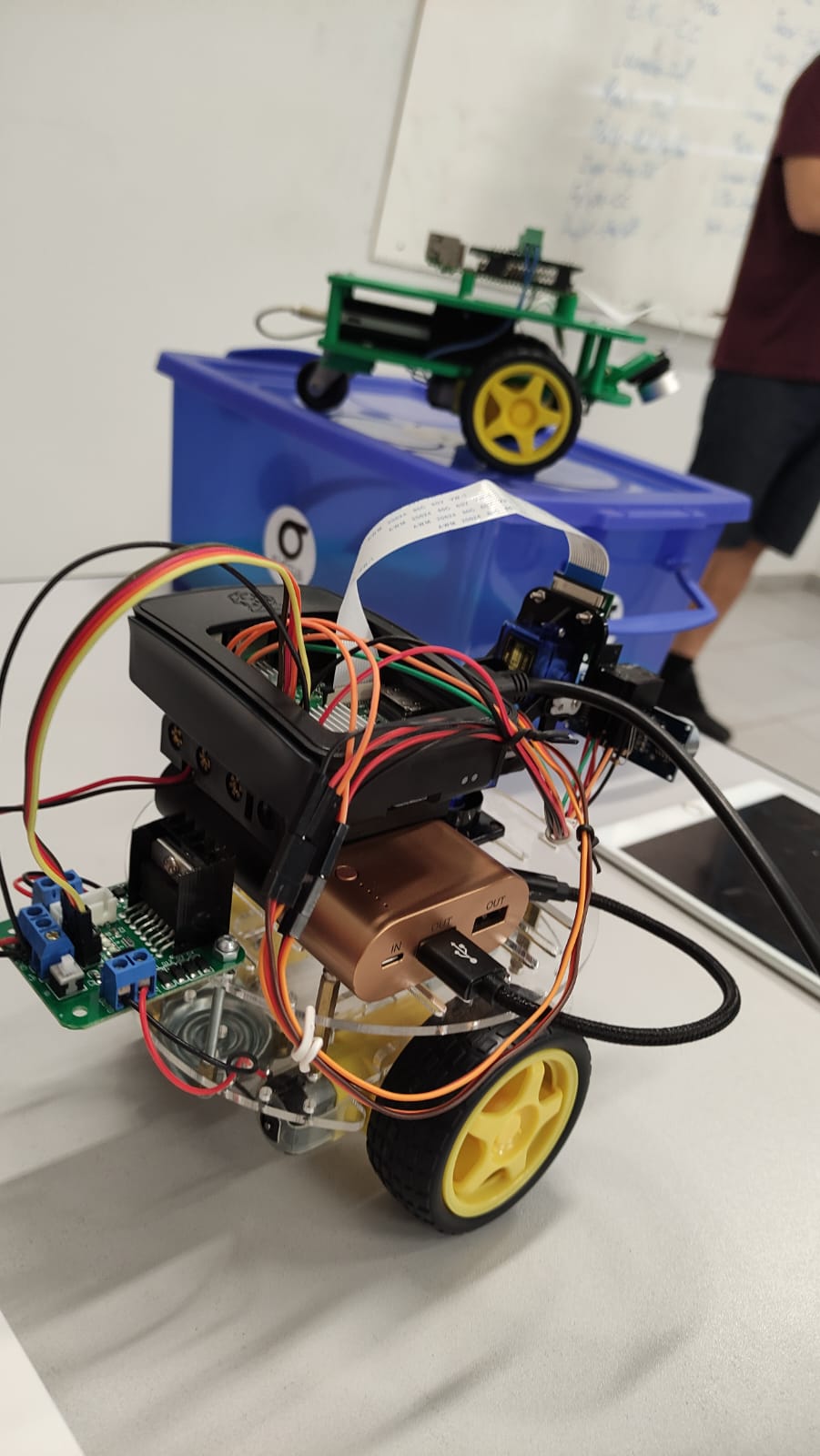
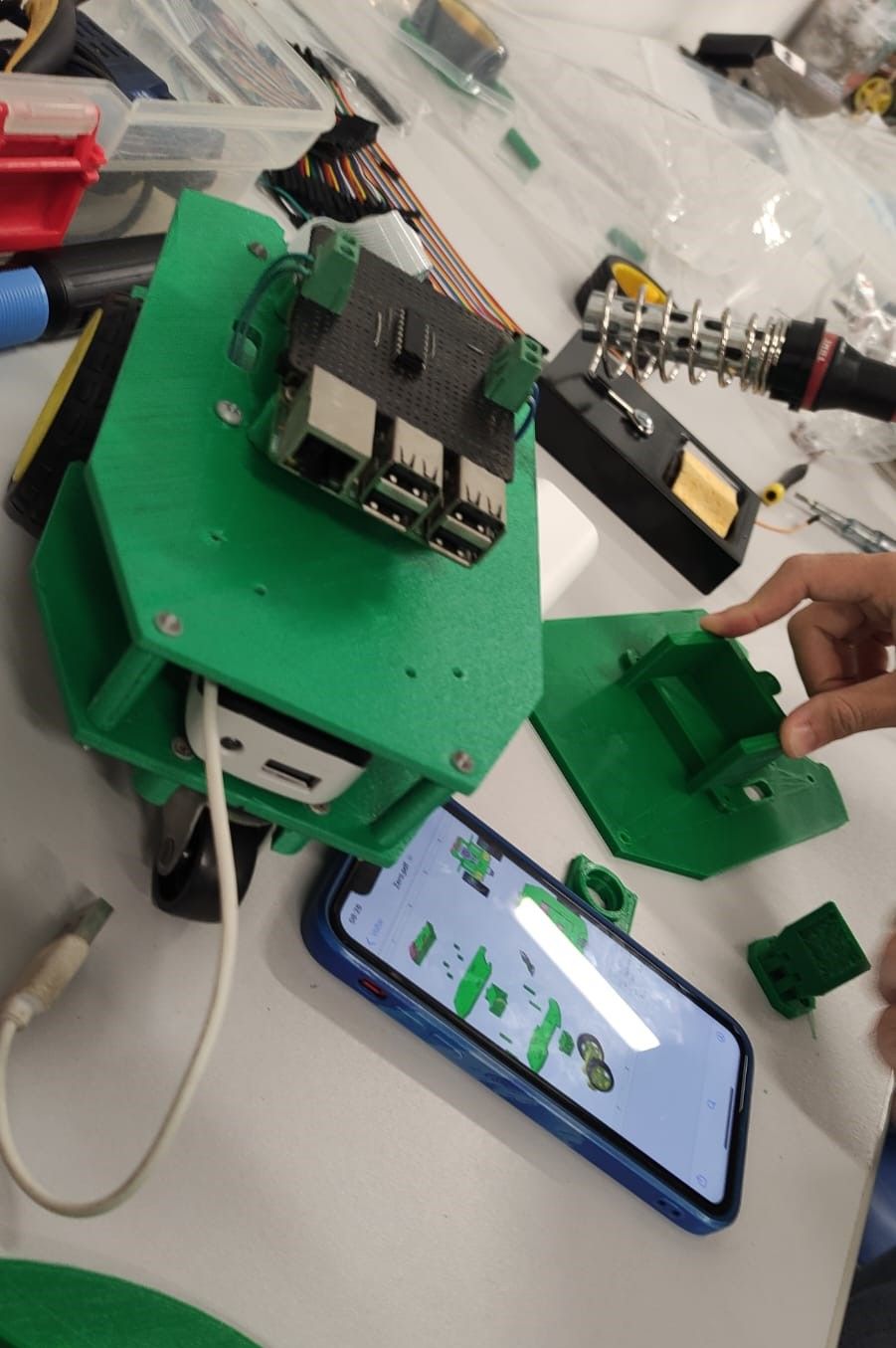
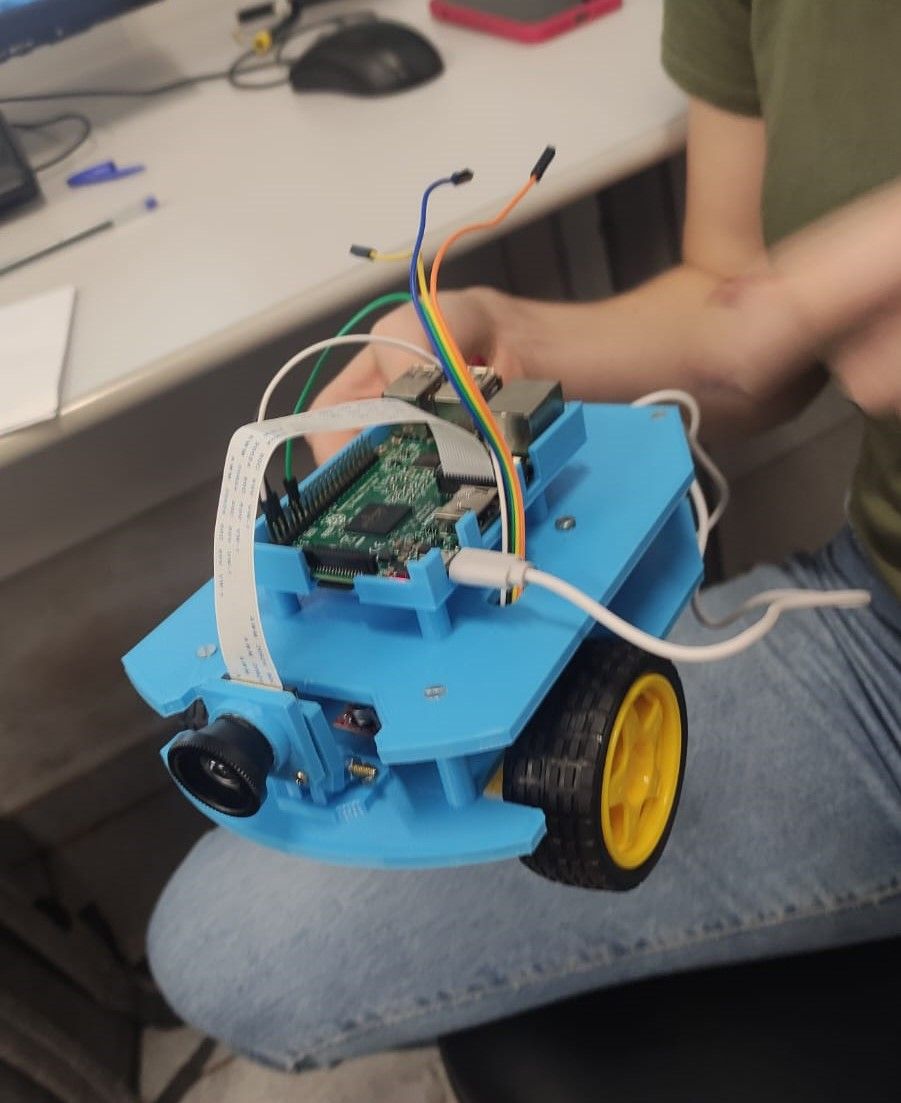
Estes, assim como todos os tópicos previstos nas ementas do curso, ofereceram o respaldo necessário para que os participantes iniciassem, ainda no quinto dia, a montagem do esqueleto do robô. As peças foram impressas em 3D e cada time recebeu uma cor que o representasse, então procederam à montagem de rodas, placas, sensores e o anexo do circuito digital Raspberry, o qual aprenderam a programar no decorrer das aulas e é o componente responsável pelos processamentos do robô (enxergar a pista, entender as cores e comportamentos que deve assumir etc.).
Este trabalho com a Visão Computacional se estendeu com uma visita ao Hackerspace Maringá, um ambiente de Cultura Maker, a qual também foi prevista e trabalhada durante todo o curso, colocando em discussão temas como Fabricação digital, Indústria 4.0, produtos Open Source e Open Hardware e o DIY (do inglês Do It Yourself – Faça você mesmo).

O desenvolvimento da Visão Computacional junto à Cultura Maker se estendeu pela segunda semana do curso, com a montagem e programação dos robôs para a competição final.
Dia #6
No sábado que antecedeu a etapa de montagem dos robôs, os participantes do curso retomaram atividades e exercícios sobre linguagem de programação em C e C++.
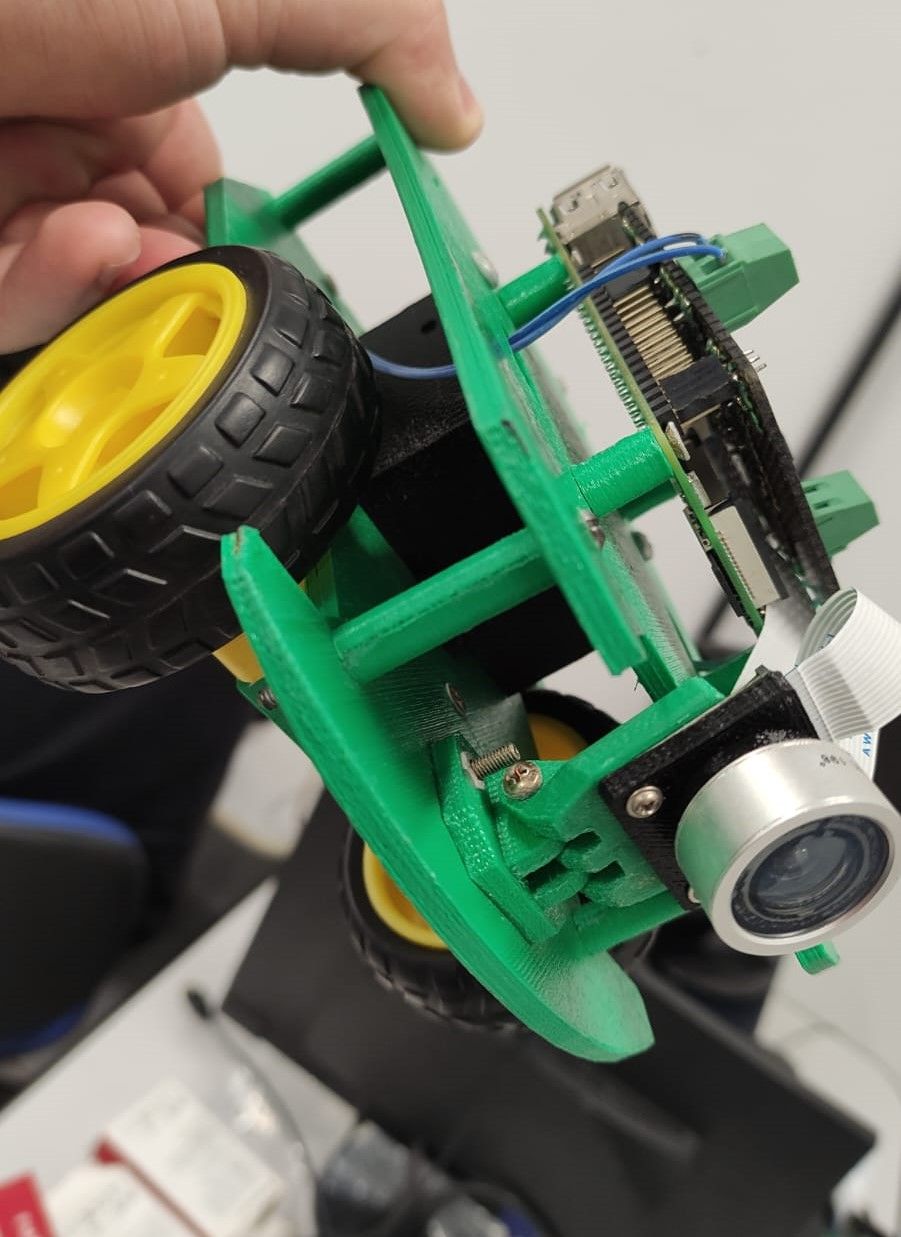
Foi iniciada a montagem do robô em formato de carro, com rodas e sensor de aproximação. Esta etapa foi a precursora das atividades de aplicação prática executadas durante toda a segunda semana do curso.
 |
 |
 |
 |
 |
 |
Dia #7
No dia sete, os professores Rodrigo Calvo e Guilherme Rocha abordaram simuladores de robótica, bem como matemática aplicada a este campo e espaço 3D, junto a práticas usando o CoppeliaSim.
Também neste dia foram formadas as equipes vermelha, laranja, amarela, verde e azul, com os alunos divididos por idade e aproximação, as quais executaram as atividades em conjunto durante a segunda semana. O primeiro desafio proposto às equipes foi, com o Arduino, montar um carro autônomo que desviasse de obstáculos usando o sensor ultrassônico, com o primeiro desvio para a esquerda e os demais organizados aleatoriamente.
 |
 |
 |
 |
 |
Dias #8 e #9
O oitavo dia foi destinado à prática, com as equipes realizando a montagem de seus robôs, respectivos sensores e microcontroladores para, no nono dia, fazerem o mapeamento da pista que foi usada para o desafio final. Este mapeamento foi realizado através da visão computacional.
 |
 |
 |
Dia #10
O décimo dia do curso também foi dedicado ao mapeamento da pista, pela visão computacional, que seria usada para a competição final. No formato de uma cidade, a pista conta com ruas, quarteirões e cruzamentos, os quais os robôs precisavam reconhecer por meio das cores que foram designadas. Conforme a cor, o robô deveria ser capaz de tomar as decisões de por onde seguir de forma autônoma.
No período vespertino, a equipe do programa Tribuna da Massa (Rede Massa – SBT) visitou o local das atividades para coletar informações e entrevistas sobre o curso de verão. (Link para a matéria disponível no início desta página).
 |
 |
Dia #11
O grand finale do curso consistiu na competição das equipes, que programaram e prepararam tudo para que seus robôs cumprissem os desafios no menor tempo possível. Fatores como tempo para cumprir uma tarefa e penalidades (erros de direção, por exemplo) impactaram no resultado final.
Também neste dia a equipe da Tribuna da Massa retornou para novas entrevistas e coleta de material dos carros em funcionamento. As equipes vermelha e azul ficaram empatadas na pontuação final e, após uma acirrada disputa para decidir a campeã, a equipe vermelha levou a melhor no tempo, cumprindo o desafio em 15 segundos a menos que a equipe azul.
A avaliação a respeito do desempenho pessoal e desenvolvimento de soft skills também foi feita novamente, mediante todos os conteúdos trabalhados e os trabalhos desenvolvidos em equipe, assim como a avaliação do curso por parte dos alunos, os quais se mostraram bastante satisfeitos com o processo e os resultados.
 |
 |
 |
 |



Deixe um comentário